文章目录[隐藏]
看本文章之前可以先看:遥感无人机之认识极侠,极侠各部件名称介绍
组装飞行器
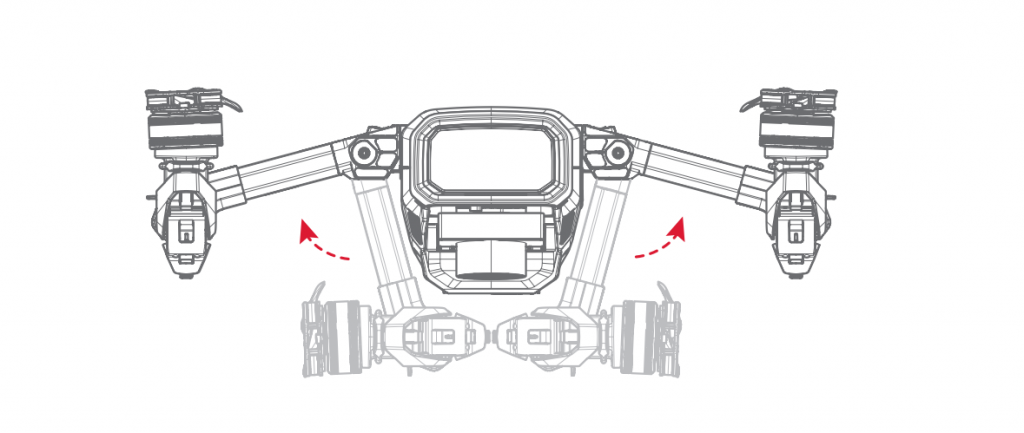
展开飞行器
如图所示展开机臂,注意听到“咔”的一声,并确认机臂卡到位。
展开脚架
如图所示展开机臂,注意听到“咔”的一声,并确认机臂卡到位。
展开脚架 如图所示展开脚架,注意听到“咔”的一声,并确认脚架卡到位。确保脚架与机臂卡紧无缝隙。
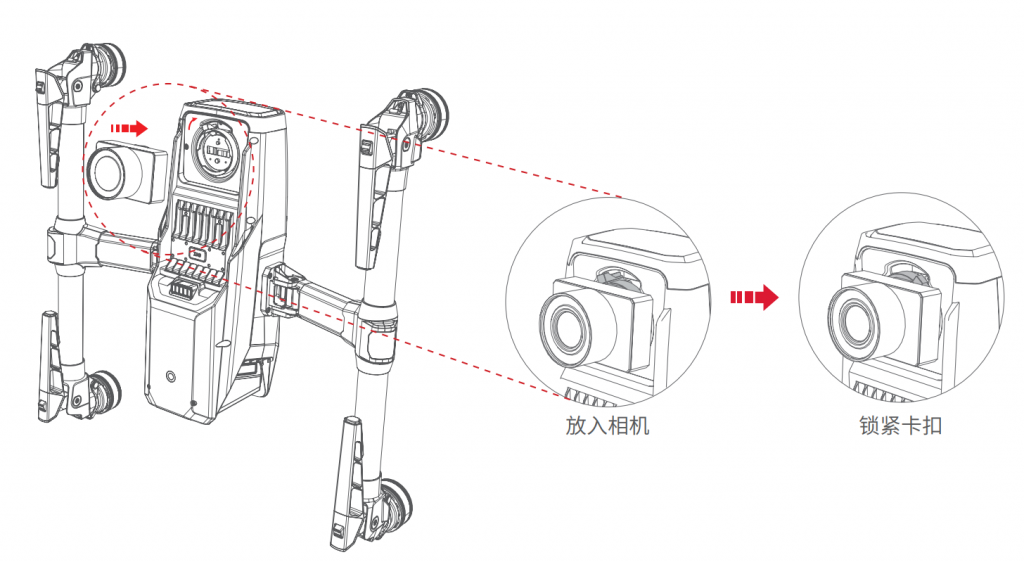
安装相机
把相机卡入槽位,将相机上的白点对准无人机卡盘上的开锁图标,从左向右顺时针旋转卡扣,使卡盘上的闭 锁图标对准白点,并确保卡紧。
请在无人机断电的情况下安装 / 插拔相机,在通电情况下安装 / 插拔相机会导致相关部件损坏。
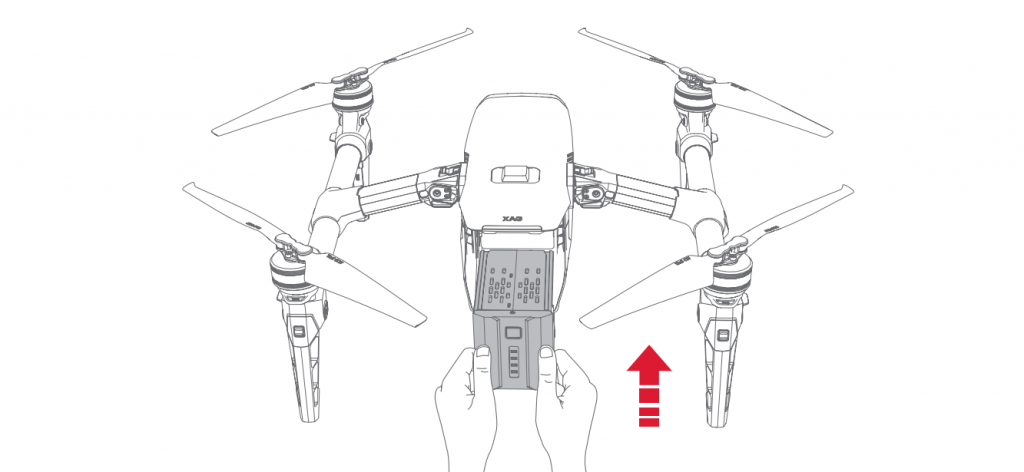
安装电池
以图示方向推入电池,注意直到听到“咔”的一声,并确认电池卡紧在电池仓内。
注:电池安装不到位会导致无人机在空中断电,进而发生飞行事故。
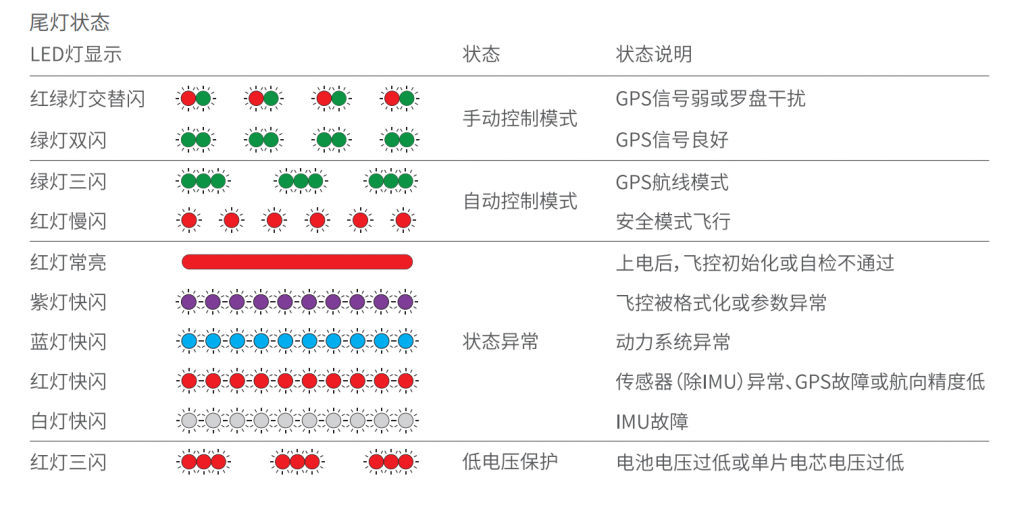
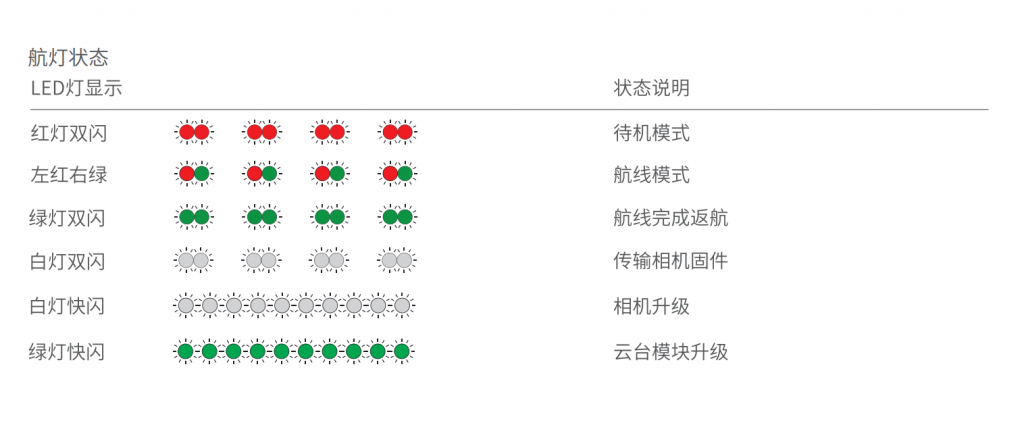
状态指示灯
通过查看飞行状态指示灯(尾灯),可以获取飞机的当前状态,状态指示灯的相关定义如下:
定位系统
极侠采用 RTK + GNSS 定位系统,实时厘米级飞行定位,为各类空中任务提供高精度位置数据支持。飞行器 搭载 4G 网络模块,可接入极飞云 RTK 基站网络,在基站网络的有效覆盖范围内无需架设移动基站便可立即 投入工作,手持终端亦会连入极飞云 RTK 基站,双链路同时传输差分数据,保证定位精度的可靠。
飞行器支 持 PPK 后差分,方便在飞行器无法接收差分信号时进行测绘作业。在没有极飞云 RTK 覆盖的区域作业时, 用户可以选择通过 APP设置接入千寻网络或者 CORS 网络完成作业任务。飞行器还有一个备份的 GNSS 定 位模块,提供普通的定位精度,当 RTK 定位系统发生故障时,会自动切换到 GNSS 定位系统,保证飞行安全。
通讯系统
极侠有两条通讯链路:一条是地面站与飞行器之间的 2.4G/5.8G 数传链路,该链路能够同时传输上下行控制 数据以及图传的视频流数据;另一条双卡全网通网络通讯链路,支持移动 / 联通 / 电信、4G+/4G/3G/2G, 使飞行器具备联网能力,可以通过互联网完成数据传输。
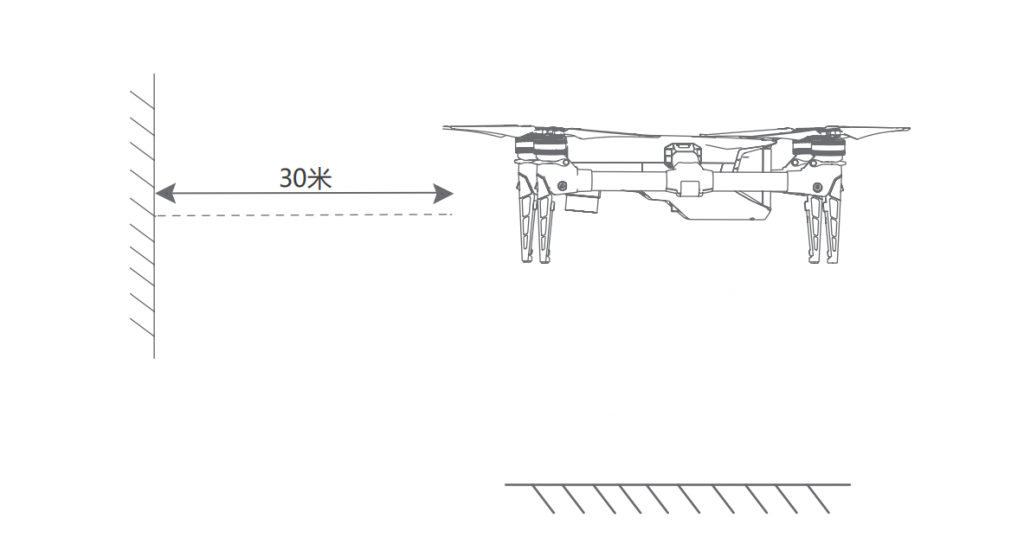
飞控及感知系统 极侠搭载极飞科技最新研发的 SUPER X3 Pro RTK 飞控,内置 3 个 IMU,拥有强大运算能力和冗余保护功能, 支持全自主飞行;同时配备 120 米仿地雷达及 30 米前视防撞雷达感知系统,支持 120 米地形扫描,自动跟 随测绘地形,检测、预判并绕开障碍物等功能,让飞行更安全稳定,满足多种复杂地形的测绘需求。 防撞雷达 飞行器前端安装了一个毫米波雷达用于飞行的安全响应,防撞的响应覆盖前方 30 米范围,满足高速飞行时 的防撞需求。
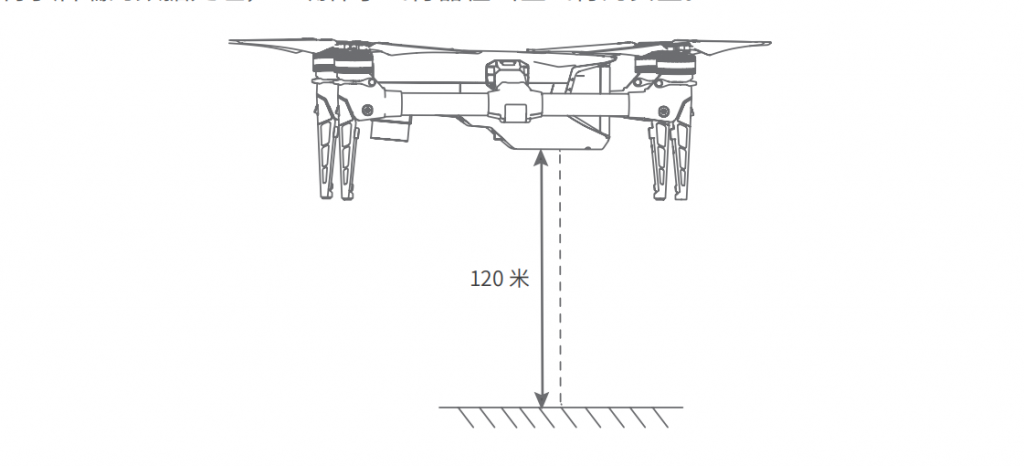
地形跟随雷达
极侠 XMISSION 多功能无人机带有一个 150 米量程的毫米波雷达,支持 120 米以下的高精度仿地飞行;当飞 行高度高于 120 米时,飞行器会自动切换成仿 Google DEM 飞行。地形跟随保证了相机获取的影像地面分辨 率一致,有利于后端的数据处理,且确保了飞行器在山区飞行的安全。
注:仿地高于 120 米的数据以 Google DEM 为准。
智能电池
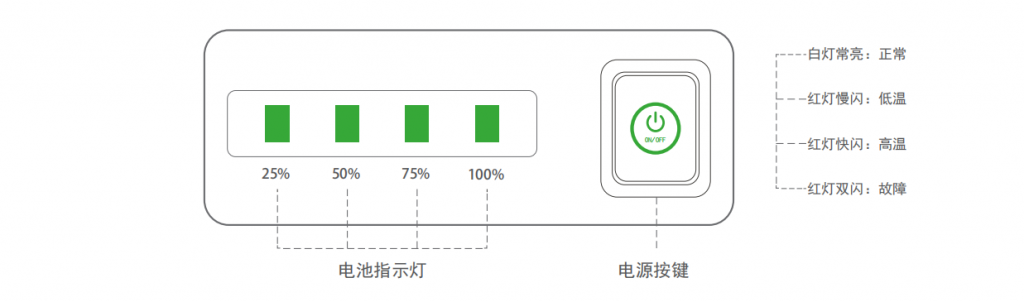
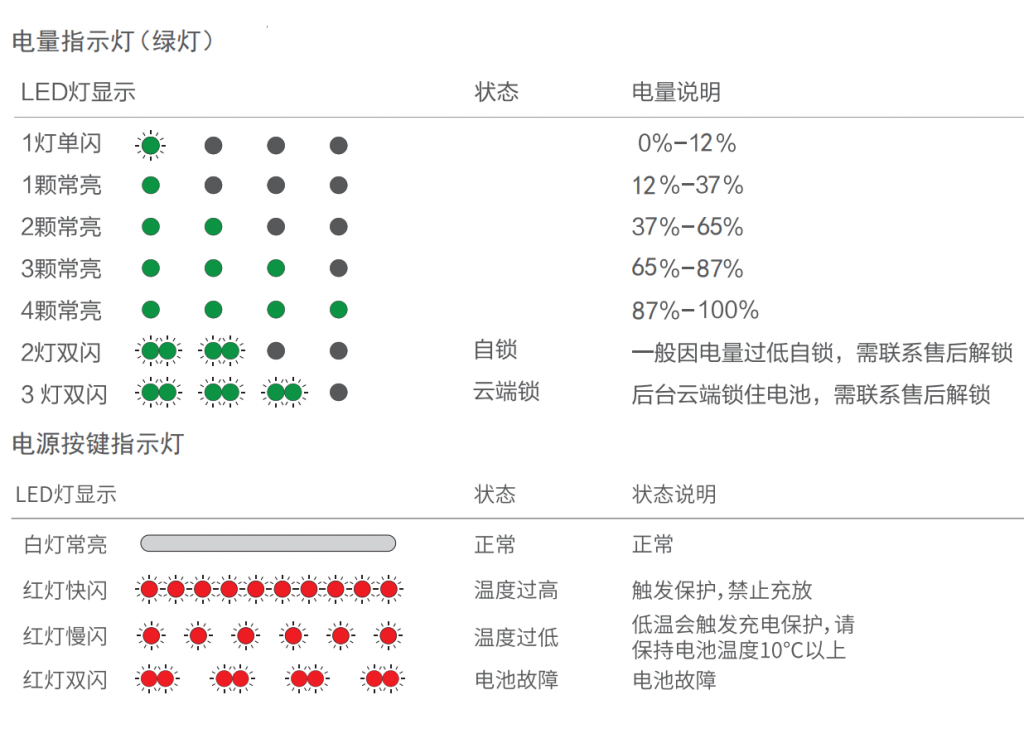
极侠 XMISSION 多功能无人机指定使用 B6130 智能电池,电池内部包含 6 节动力型高压锂聚合物电池,并且 集成 BMS 模块,能实时监测电压、电流、温度等状态信息,同时具备充电保护功能。电池在使用的过程中, 能实时给负载反馈信息,当电量不足或者出现故障,会主动发送紧急停止命令,以保证负载的用电安全。智 能电池一共包含 1 个电源按键和 4 颗指示灯(如下图)。相关按键指示灯定义如下:
电池开 / 关机 在电池关 / 开机状态下,接上无人机或充电器,长按电源按键至少 1 秒钟,等待所有电量灯同时亮起并闪烁时, 松开按键 ; 再次长按电源键至少 1 秒钟,直至电池发出“嘀”声,同时状态指示灯亮起 / 熄灭,表示成功开 / 关机。
电池充电
充电时电量指示灯会在未满电的电量区间以“流水灯”的形式闪烁,表示正在充电,其他满电区间常亮。充 电完成后五秒电池会自动关机。
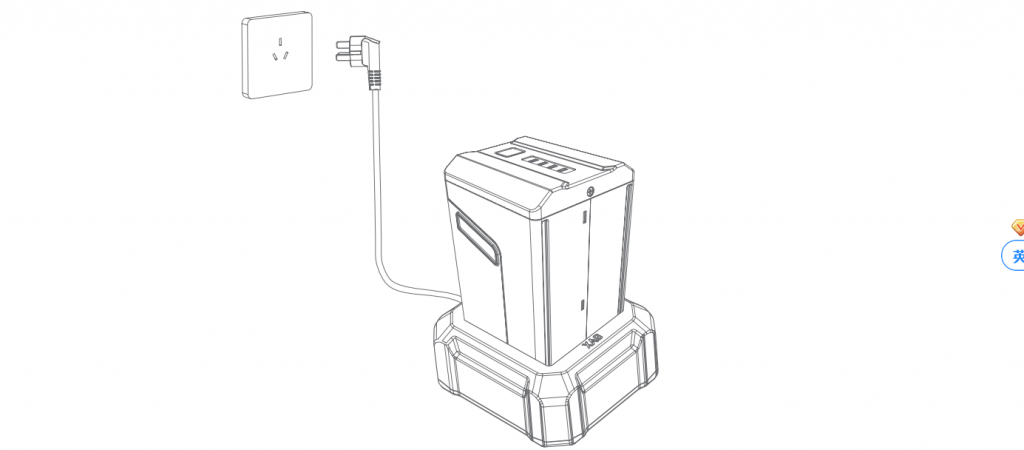
极侠快速充电器
技术参数
- 输入电压范围:90-264VAC
- 额定输入电压:220-240VAC
- 输出电流:8A(MAX)
- 输入电压:26.1V
- 工作温度:-20~40℃
- 效率:>90%@ FullLoad and 230VAC
注意事项 ·
- 使用充电器时,要保证电池插牢后,操作电池开机进行充电。
- 充电完毕后,关闭电源后拔出。 ·
- 使用充电器时,请置于阴凉通风处,避免阳光直射,保证散热条件良好,切勿靠近其他热源。
- 当温度过高 时充电器会过温保护,待温度降低后会继续充电。 ·
- 请不要拆卸或改装充电器,严禁在电源线损坏的情况下使用充电器,否则会导致触电、起火或充电器损坏。 ·
- 注意防止杂物等污染输出端子,避免输出端子短路。设备不防水,严禁淋湿后使用。 ·
- 使用过程中请轻拿轻放,禁止拆开,戳穿外壳,人为给电池施压。 ·
- 请保护电池连接器清洁,避免金属物体接触电池连接器。 ·
- 每次使用完毕后请将电池充电到 40%-60% 进行存放。
- 避免放置在低于 -10℃或者高于 45℃的环境中。 ·
- 长时间不使用电池时,请将电池放置在阴凉干燥处,每隔 90 日应对电池重新充放电以保持电池活性。 ·
- 禁止将电池曝晒或者淋雨 。 ·
- 禁止使用非官方充电器进行充电,充电时远离易燃易爆物品,并且有人值守。 ·
- 报废电池时,请遵守当地的法律法规,请勿随意丢弃本电池,共同保护自然环境。
电池充电必须使用官方充电设备,对于使用非官方充电设备充电造成的一切后果,由用户自行承担相应责任。
相机 &XStation
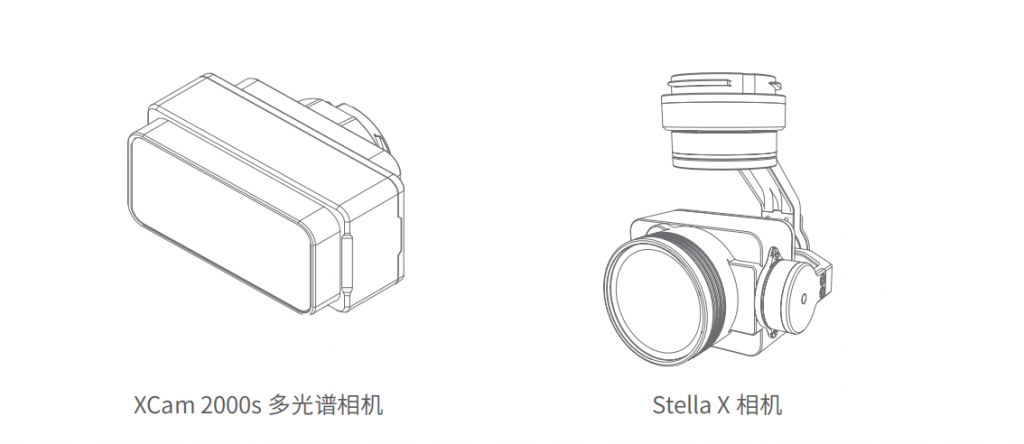
XCam 2000s
相机 XCam 2000s 相机能够轻松进行厘米级高精度测绘,可提供云端 / 本地拼接方案,生成 1:500 高清地图,经 过 XAI 智慧农业大脑自动识别农田边界 / 作物的定位后,直接导入 P 系列植保无人机进行全自主植保作业。 相机内置 1 英寸 2000 万像素 CMOS 传感器,高解析度成像,机械全局快门,在高速飞行时仍可拍摄出不扭 曲不失真的画面,消除果冻效应。通过与 RTK 信息精准配合,图像能与位置信息进行毫秒级时钟同步,满足 1:500 高精度建图要求。预置镜头畸变矫正数据,自动光学对焦,保证高清晰成像,方便后期拼接处理。更 可对复杂环境进行三维地形建模,借助 120 米仿地雷达模块,跟踪地形起伏进行 3D 航线飞行,保证整体建 图分辨率一致。
XCam 2000s 多光谱相机
多光谱相机可捕捉四个波段的作物高清影像及高清 RGB 可见光影像,生成在现场直接查看的像素级对齐的 指数地图,立即辅助农业生产决策。其借助 XAI 生成的农田作业处方图,可直接导入 P 系列植保无人机进行 处方图植保作业。相机搭载 1 英寸 2000 万像素 RGB 相机 + 四光谱通道高感光 CMOS 传感器,可捕捉四个波 段的农田作物高清多光谱影像及高清 RGB 可见光影像。机械全局快门与 RTK 导航精准配合,图像与位置信 息进行毫秒级时钟同步。四个通道成像像素级自动对齐,具备全自动光敏辐射校准功能,能够现场直接得出 精准农田遥感影像,所见即所得。对比于市面上其他几个需要经过软件拼接才能查看指数地图的多光谱相机 具有明显的优势。配合 ARC1 PRO 智能遥控器使用时,XCam 2000s 多光谱相机支持显微镜功能,高空拍摄时, 用户可以通过屏幕观测当前多光谱画面,如发现任何农田异常,极侠可立即对异常位置点进行低空近距离高 清补摄,同时输出多光谱影像及 RGB 影像,最快速度辅助农田决策。
XStation 数据处理终端
在没有网络信号或者不方便使用云端拼接时可以选择 XStation 数据处理终端完成拼接任务。将 SD 卡插入 XStation 数据处理终端中,根据作业场景和建图需求选择 3D 或平面、精细或快速等模式,XStation 数据处 理终端就会对图像进行相应的处理,在完成拼接后,连接到 XStation 可以下载拼接成果,提供给 P 系列农 业无人机作业。