什么是RTK?
RTK(Real - time kinematic,实时动态)载波相位差分技术,是实时处理两个测量站载波相位观测量的差分方法,将基准站采集的载波相位发给用户接收机,进行求差解算坐标。
RTK 定位系统的组成?
RTK定位系统由手持测绘器(20款及之后的由ACS2+查分定位模块构成,19款及之前老款是测绘杆+蘑菇头构成)、移动基站与固定基站(云基站)组成,为农田测绘、无人机飞行提供厘米级的高精度定位。
2019款之后的农业无人机使用的事双擎RTK模块,不再有主副天线之分(安装的时候区分R和L,使用时不区分),两路天线同时进行工作,当任意一根天线信号不良时,另一根天线依然可以持续工作,保障飞机的飞行安全。
定位系统各部件的作用是什么?
- 手持测绘器:使用手持测绘器进行农田测绘,记录农田边界和障碍物位置等信息。
- RTK天线:主天线搜星,副天线和主天线一起确定飞机航向
- 云基站:为飞机提供RTCM数据和航线数据等
- 移动基站:通过电台广播传送RTCM数据给无人机(主要用于距离云基站距离过远或没有云基站)
注:RTCM全名国际海运事业无线电技术委员会,是国际标准组织。RTCM数据是一种以RTCM标准发出的差分数据
定位系统时怎么工作的?
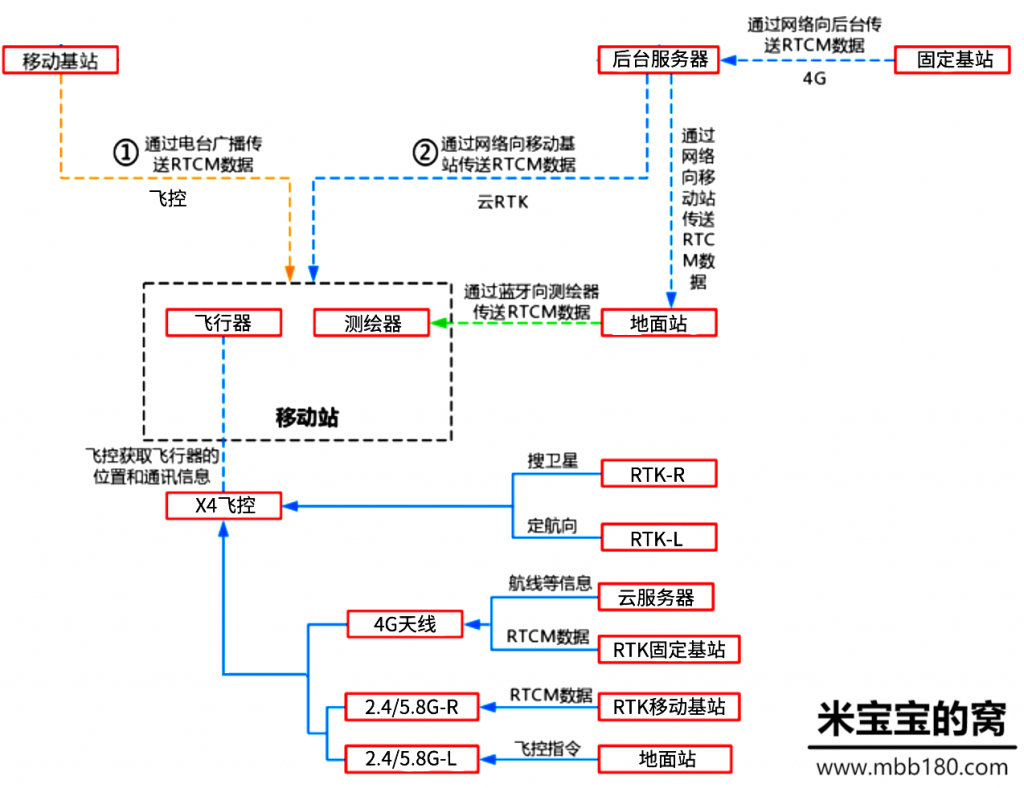
当移动端(无人机,测绘器)的 RTK 主机与基站(移动基站,固定基站)的 RTK 主机共用卫星信号 足够、稳定,且接收到的 RTCM 差分数据稳定、有效时,无人机进入实时的、高精度定位状态。因此,在 无人机的定位系统中存在两条链路,一条是移动端的搜星链路,另一条是 RTCM 差分数据的通讯链路。
- 移动站的搜星链路:无人机的搜星链路主要通过无人机端的 RTK 模块来实现,4 号机臂上的 RTK 主天线负责无人机收星定位,3 号机臂上的 RTK 副天线负责获取无人机的航向(2019款及之后的农业无人机使用全新的双擎 RTK 模块,不再有主副天线之分);测绘器的搜星工作则直接由测绘器内 置天线来完成。
- RTCM 差分数据传输链路:RTCM 差分数据主要由基站端传送给移动端,基站传送给移动端的方 式有多种,其中主要可通过三种途径广播数据给无人机和测绘器:
a. 2.4/5.8GHz 双频天线(P 系列 2018 款及之前植保无人机为 900M 天线)电台直接广播数据给无人机 或手持测绘器(广播距离约半径 2km);
b. 通过自身网络将 RTCM 差分数据发送至云服务器,再由云服务器通过网络发送至无人机或手持测绘器
c. 通过数传将数据发送给 地面站,地面站再通过网络将数据上传给服务器,再由服务器发 送给无人机或手持测绘器。固定基站可通过自身网络将 RTCM 差分数据发送至云服务器,再由云服务器通过网络发送至无人机或手持测绘器。